Cascade R-CNN: Delving into High Quality Object Detection
Abstract
- hypotheses:假设,猜想;在文中可以理解为:proposal,object candidate 或 pred bbox,以下就不中文翻译此词了;
- close false positives:缩写close FP,指目标检测任务中与 ground true 很靠近,却属于 false positives,很容易被检测器误检为正样本的负样本,也即 “close but not correct” bbox;
在目标检测当中,IoU 是决定正样本和负样本的重要参数。同时,检测的性能会随着 IoU 与阈值的提高而下降。造成这样的原因主要有两个:
- 训练中由于正样本呈指数级消失导致过拟合。提高了 IoU 阈值导致满足这个阈值条件的 proposal 比之前少了,容易导致过拟合。
- 推理时,检测器最优的 IoU 阈值 和输入的 proposal 之间不匹配(mismatch 问题)
为了解决以上两个问题,本文提出了以下几种方式解决:
- 本文的网络结构是把经过不同 IoU 阈值训练的检测器组合在一起,对 close FP 有更强的鲁棒性。分多个阶段来训练检测器,用上一个检测的输出的分布作为输出,输入到下一个检测器以便能够训练更高的检测器。
- 逐步改进 proposal 的重采样,保证所有的检测器都有一组相同大小的正样本集,减少过拟合的问题。
- 在推理过程中同样使用级联操作,使得 proposal 和每个阶段的检测器的输出结果之间更加匹配。
在 COCO 数据上,本文算法超过了所有单模型的目标检测算法,还可以将本文算法迁移到其他目标检测算法时,作为 baseline 也能够取得性能上的提升。
Introduction
目标检测主要解决两个任务:
- recognition:检测器要解决 recognition 的问题,把前景目标从背景力提取出来,并且给予正确的类别标签。(一般来说,人脸检测只需要把前景从背景提取出来即可,通用的目标检测需要给出准确且清晰的类别)
- localization:检测器要解决 localization 的问题,给前景目标预测出正确的 bbox 位置。
解决这两个任务会面临海量 “close” false positives (像正样本,但是不是正样本 FP),而且还会和 TP 混淆,不仅要检测出 TP 还要抑制 close FP。
现在大多数都是使用 two-stage 的方式实现目标检测,也就是同时完成 分类 + bbox 回归的 multi-task,IoU 阈值用来定义生成的正负样本,使用 值表示 IoU 阈值,通常来说 对正样本来说条件比较宽松,像 figure 1 (a) 中会产生许多噪声 bbox。人眼能够判断为 close FP 的 proposal 可以通过使用 的方式来约束,尽管使用 可以生成数量足够多且多样化的正样本,但是也会导致 close FP 的生成,导致检测器很难区别 close FP 和 TP。
hypothesis 的质量:hypothesis 与 ground true 的 ;
detector 的质量:用于训练该 detector 的 阈值 ;
为了能够实现 figure 1 (b) 的效果,输出要尽可能减少 close FP,本文主要探索在给定什么 IoU 阈值的情况下能够达到最优的效果,而不是考虑降低 FP 的数量。
figure 1 (c) 和 (d)展示了在 IoU 阈值 u = 0.5、0.6、0.7 下,训练的检测器在 localization 和 detection 上的性能,fig 1(c)为 localization 性能,基于输入 / 输出 proposals 与ground true 的 IoU 评估(三条彩色线都在baseline的灰色线之上,说明检测器输出的结果对于输入而言,性能还是有提升的),figure 1 (d)为 detection 性能,使用COCO中经典的动态调整 IoU 阈值得到不同 AP 性能的方案。
figure 1 (c) 中,每个 bbox 回归器只有在训练时给定 IoU 阈值的情况下才对应最佳的检测性能,直到过拟合。从 figure 1 (d) 中可以看出, 训练的检测器在低 IoU 阈值下,性能优于 ,但在高 IoU 阈值下,性能低于 ,同理 ;这说明如果仅使用单一的 IoU 阈值训练检测器,其并不能在各个 level 的 proposals 上都取得最佳性能。(检测器在低 IoU 的情况下训练能够让其知道如何把不准确的 proposal 大幅度调整到和 ground true 匹配,但对于高质量的 proposal,主要稍微调整就可以和 ground true 匹配)
上面得出了一个结论:不同质量的 proposal 最好使用不同分支进行操作,对于不同质量的 proposal 需要在不同 IoU 阈值的情况下训练才能更好地和 ground true 以及对应的 proposal 匹配。
通常来说,一个检测器只能在单一的 IoU 阈值下面进行优化,并不会其他 IoU 阈值下达到最优。
所以,为了训练更高质量的检测器,只是简单提高训练过程中的 值是远远不够的。正如 figure 1 (d) 所说的 提高 值会降低检测性能。问题在于:
- 政府样本分布不均衡,如果再提升 IoU 阈值来筛选样本,正样本的数量会大幅度呈指数级减少,导致样本更不均衡了,同时也导致模型过拟合。
- 经过 figure 1 (c),可以看出,看个检测分支经过特定 IoU 阈值下取得的样本训练后,若检测的 hypothese 也处于该 IoU 的范围内就可以获得较优的检测效果。反之,如果该分支作用在其他 IoU 阈值下获得的只能是次优的效果。也即在训练、测试阶段,不同 IoU 阈值下获取的样本训练的检测分支效果不同。
所以对于整个检测网络来说,最优的方式应该是:在低 IoU 阈值的情况下训练低质量的 hypotheses,经过 refine 后,低 IoU 阈值的分支无法处理高质量的 hypotheses,此时把高质量的 hypothese 交给高 IoU 阈值的分支进行训练,使其恰好能够 match,可以做进一步 refine。(通过观察figure 1 (c)中各区间段性能就可以发现,不同IoU分支最适合处理其对应训练IoU下的hypotheses。)
另一个主要的不同之处在于本文使用了 resampling 不是为了挖掘难以区别的负样本,相反,是通过调整 bbox 让每一个阶段都找到一组接近 close FP 的 stage 来 train 下一个 stage。这样做就可以解决过拟合的问题。
在推理过程中,使用与训练相同的级联操作。经过不同 IoU 分支训练之后提升的 hypotheses 可以更好在每个阶段提升检测的质量。
本文算法不仅可以吊打所有的单模型目标检测网络,在 COCO等更高评估标准上也同样能够吊打,还能够把本文的思想迁移到其他任意 R-CNN 的 two-stage 方法上,提升 2 ~ 4 个点效果非常显著。
Related Works
基于 R-CNN 的 two-stage 目标检测算法,包含了 proposal detector + region-wise classifier 两步骤,同时完成分类 + bbox 回归的 multi-task。
为减少 R-CNN 中的冗余计算,SPPNet、Fast RCNN 使用 region-wise feature extraction(空间金字塔pooling、RoI pooling),只需对图像单次前向卷积提特征,避免了多个 proposals 重复计算卷积提特征的高计算量,Faster R-CNN 采用 RPN 进一步提高提取 proposals 的速度且做到了整个检测框架的 end2end;
R-FCN:通过替换 RoI pooling 为 position sensitive RoI pooling,采用 region-wise 的全卷积替换 Fast R-CNN 中的 fc 层,将 Faster RCNN 中 2nd-stage 的 Fast RCNN 计算量进一步压缩,速度快,效果好;
MS-CNN、FPN:two-stage,在特征金字塔的多个分支上生成 proposals,可以有效避免 Faster R-CNN 中单个 feature map 上目标尺度与感受野尺度不匹配的问题,以达到 proposals 的高召回率;
YOLO:one-stage,对图像一次前向操作即可在 7 x 7 的 feature map 网格上得到检测结果,检测速度实时,且效果还不错;
SSD:one-stage,采用了 RPN 中预定义 anchor + YOLO 中同时输出 分类得分 + bbox回归 的思想,而且在特征金字塔 FPN 的多个不同分辨率分支上预测不同尺度目标,速度快,性能更好;
RetinaNet:one-stage,通过 focal loss 改进目标检测中 foreground / background 类别不平衡的问题,比 sota 的 two-stage 方法性能还要好;
iterative bbox reg:multi-stage,如fig 3(b),通过对同一个 R-CNN 操作多次,以生成更高质量的 bbox;
AttractioNet、CRAFT:使用 multi-stage 操作生成更准确的 proposals,再用 Fast-RCNN 做进一步目标检测;
Cascade CNN、CC-Net:使用经典的 Cascade 方案完成人脸、目标检测;
Object Detection
下面介绍目标检测所包含的任务。
- 第一阶段:在整张图像上使用 proposal 子网络 H0,生成最初的 proposal。
- 第二阶段:hypotheses 输入到 RoI 检测子网络 H1,表示检测头(detection head)
- 最终每个 hypotheses 得到一个分类分数 C 和 bbox 回归值 B
Cascade RCNN关注于multi-stage的检测子网络,proposals基于RPN(Region Proposal Network)生成。
BBox 回归
一张图像 上预测的 bbox 坐标:,bbox 回归任务:学习一个回归器,将 尽量靠近 ground true bbox ;训练流程通过训练样本集 ,最小化损失函数 实现:
在 R-CNN 中为 L2 loss,Fast R-CNN 中为 Smoothed L1 loss;为了保证回归对尺度、位置的不变性,一般 会操作向量 ,处理方式表示为:
表示 ground true 对应的坐标, 表示预测出来的坐标。因为 refine 的幅度可能比较小,(2)中的数值也比较小,为了提升训练的效率,会对 做正则化,用 替代 。
还有一种观念认为,单个回归操作 f 并不能对 bbox 准确定位,那么在检测出 proposals 之后,可以叠加回归操作 f 若干次,作为 post-processing step 来更精确地调整 bbox:
这种方式也称为 iterative bound ing box regression,但所有的 head 都相同参数(即同一个 f ),但此操作会带来两个问题:
- 如 figure 1 (c) 所示,一个回归器 f 在 u = 0.5 阈值下训练,那么仅对同样为 u = 0.5 范围内的 hypotheses 性能最佳,更高 IoU 对应的 hypotheses 在该同样的 f 下性能不是最好的,而且 观察 figure 1 (c) 可以看到,对于 IoU > 0.85 的 hypotheses,u = 0.5阈值下训练的 f ,refine 输出后性能竟然还下降了。
- 如 figure 2 所示,bbox 向量内各元素数据的分布随着每个 stage 操作都会有很大变化,尽管最开始 u = 0.5 的回归器 f 对于该 hypotheses 的分布处理是最优的,但接下来两个 stage,很明显数据分布都改变了,再要求 f 同样能搞定它们就达不到好的效果。
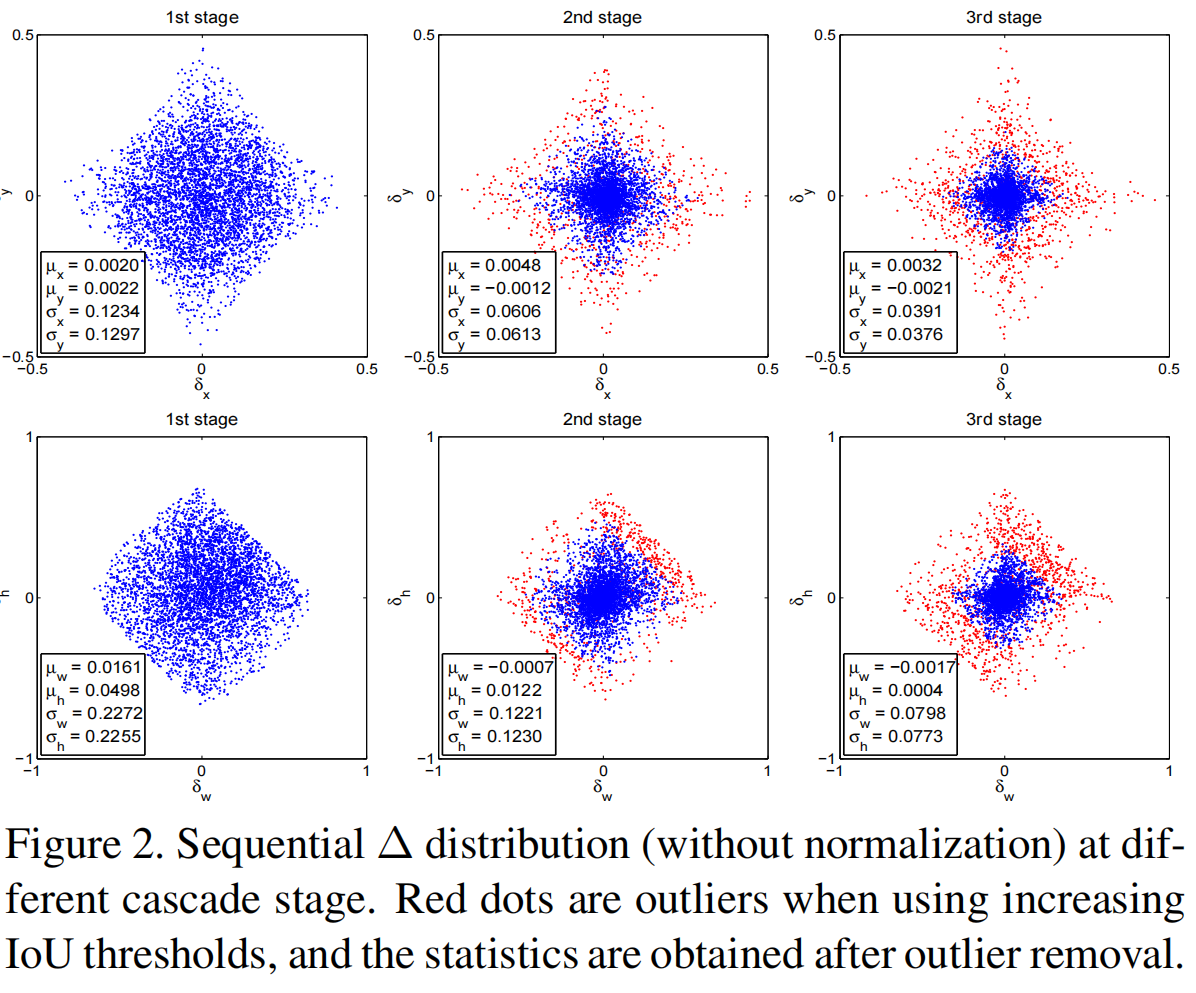
经过不同阶段的训练, 的大概分布如图,红点表示增加 IoU 阈值之后的离群值,剔除之后得到的数据。
Classification
分类器 的目标是将一张图像 ,预测为 M + 1 个类别中的一个类,因为分类对应的是一个 维的向量,所以基于各个类别的后验分布函数 得到对应的类别。 就是类别。假设给定训练集 ,最小化优化的目标是:
一般用交叉熵损失函数。
Detection Quality
目标检测一般使用 IoU 确定正负样本集,如果与某个 ground true 的 ,那么 hypotheses 可以认为是该 ground true 类下对应的一个正样本,那么 hypotheses 的类标签是 的函数:
目标检测比较难搞的一个原因是,不管 IoU 阈值 u 如何设定,检测任务总是一个对抗互斥关系的(detection setting is highly adversarial):
- 设置得高一点吧,正样本里 background 信息少,但对正样本的标准高了,正样本数量就少。
- 设置得低一点吧,可以获得到更多样化,数量更多的正样本,训练的检测器就搞不定 close FP 。
另一种解决方案如 figure 3 (c),集成若干个不同检测能力的检测分支,各个分支也设定不同的 ,损失函数也定位于学习各个分支的参数(optimized with a loss that targets various quality levels):
阈值集,如 ,类似 integral loss,但可以发现各个分支是独立输出预测结果的,没有cascade的叠层进阶关系。最后融合各个分支的检测结果,得到最终的检测结果。
但此操作还是有这么个问题:IoU 阈值高的话,正样本依然不好收集,正负样本依然不平衡,就依然会对高 IoU 阈值下的检测分支产生过拟合。
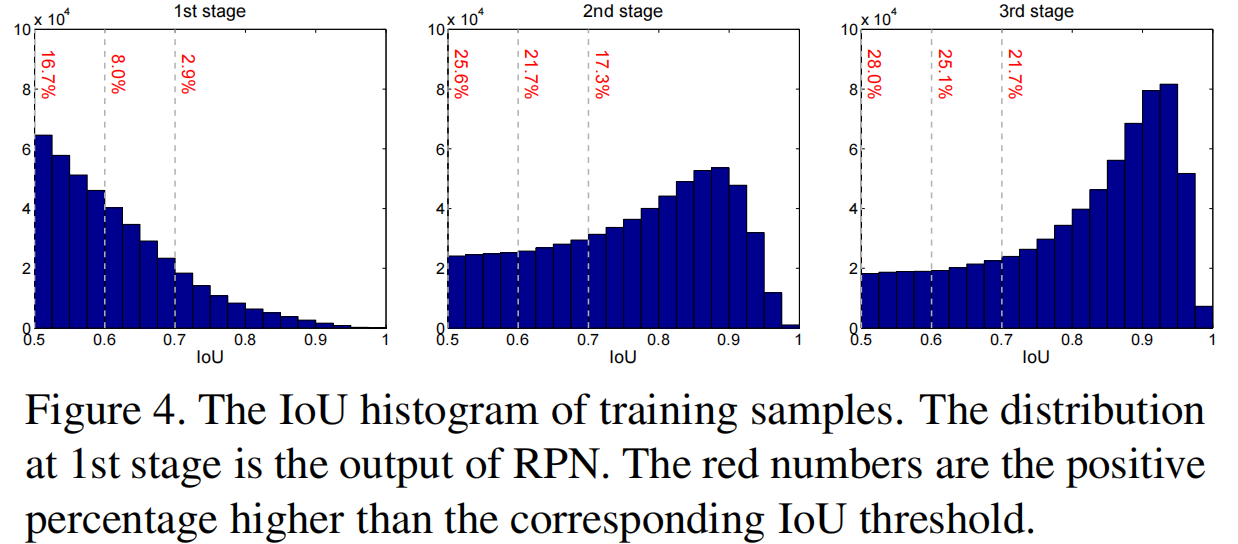
从 figure 4 中可以看到,1st-stage 输入 hypotheses 由 RPN 生成,质量比较低(大部分都是IoU:0.5 ~ 0.6之间),随着 IoU 阈值的提升,对应直方图数据分布就减少,如果依旧用这些 hypotheses 训练 integral loss 的各个高 IoU 阈值分支,经过 u 筛选之后,原先低 IoU 阈值的分支的正样本就分类到负样本了,正样本更少,正样本更加不均衡。
Cascade R-CNN
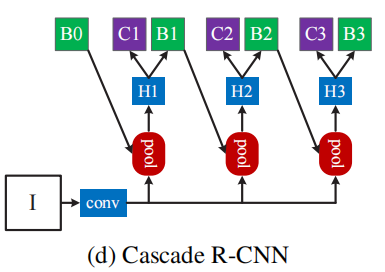
Cascade R-CNN 的结构如下图所示:
Cascade BBox Regression
表示 Cascade RCNN 叠加的分支数;cascade 中每个分支 通过各个分支上的训练数据 优化, 来源于 经过之前所有分支输出后的结果,而非直接使用 RPN 的初始分布 来训练 。;---- 这也是Cascade RCNN中经过进阶方式逐步提升hypotheses质量的精髓;
Cascade RCNN 与 iterative BBox 的不同之处在于:
iterative BBox 相当于一个提升检出 bbox 质量的后处理步骤,但 Cascade RCNN 中各个分支上的回归操作相当于在每一个阶段通过改变 hypotheses 的分布达到了重采样目的
Cascade RCNN 同时应用于 train + inference,两者实操过程在性能上不会有差异
每个专门的检测分支 基于每个 stage 调整分布后的 hypotheses 进行训练,而 iterative BBox仅使用到了一个 f ,该 f 来自于 RPN 输出的初始化分布。
优势:Cascade RCNN 随后的分支可以做更精细化的回归训练,预测也能得到更精准的定位结果,且不需要人为干预;
Cascade Detection
如 figure 4(a),RPN 输出的初始 hypotheses 质量还是比较低的,大部分都在 ,Cascade RCNN 通过各个分支 cascade 式叠加达到对 hypotheses重采样的目的;同样受启发于figure 1(c),三条彩色线都在 baseline 的灰色线之上,说明所有 阈值下训练的检测器,输出的结果对于输入而言,性能还是有提升的。
给定初始hypotheses:,cascade 上检测分支对 一番操作,产生新的样本分布 以适配更高 IoU 阈值下的检测分支,那么如 figure 4,经过每个 stage 的样本重采样工作,hypotheses 质量也变得越来越好,且即使 IoU 阈值和检测分支性能逐步提升,在所有 stage中正样本的数量大致保持在稳定范围内。
以上操作两个优势:
- 不会出现因正样本过少带来的训练过拟合,如 fig 4,每个 stage 上正样本的数量都比较充足;
- 更高 stage 上的检测分支使用更高 IoU 阈值下收集的样本训练,且从 fig 2 中可知,通过逐步提升的 IoU 阈值可以在各个 stage 上去除 outliers,就可以筛选到足够高质量的 hypotheses 用于训练各个分支;
每个 stage ,检测分支包含分类器 + 回归器 ,并使用 阈值下收集的样本集,且 ,损失函数为:
其中,, 对应 的 gt bbox, 表示权重因子; 表示只在正样本上算 reg loss,就是 按照公式 (5)和 计算出的 label。
与公式(6)中 iterative BBox 的 loss 不同之处在于,公式 (7)、(8) 确保各个检测分支的检测质量逐步提升。
在预测阶段,hypotheses 随着 cascade 上各个检测分支的操作,质量逐步提升,且更高质量的 hypotheses 刚好对应基于更高 IoU 阈值训练的检测分支,最终就产生 fig 1(c)、(d)中检测性能越来越好的效果。
Experiment
Baseline Networks
三个baseline检测器:
- Faster-RCNN:VGG 作主干网;原始 frcnn 中 2nd-stage 的 Fast RCNN 有连个 fc 层,本文做了精简以减少参数数量,每个 fc 层输入 2048 个单元,无 dropout,128 RoIs / images;
- R-FCN:ResNet 作主干网;R-FCN 基于 ResNet 使用全卷积操作完成 分类 + bbox回归(Cascade RCNN 的 head 与之保持一致),无 OHEM,256 RoIs / images;
- FPN:ResNet 作主干网;使用了 RoIAlign,实验中表示为 FPN+,主干网 ResNet-50 用于消融实验,最终预测使用 ResNet-101,256 RoIs / images;
都使用原论文中默认训练参数,采用end2end训练;
Quality Mismatch
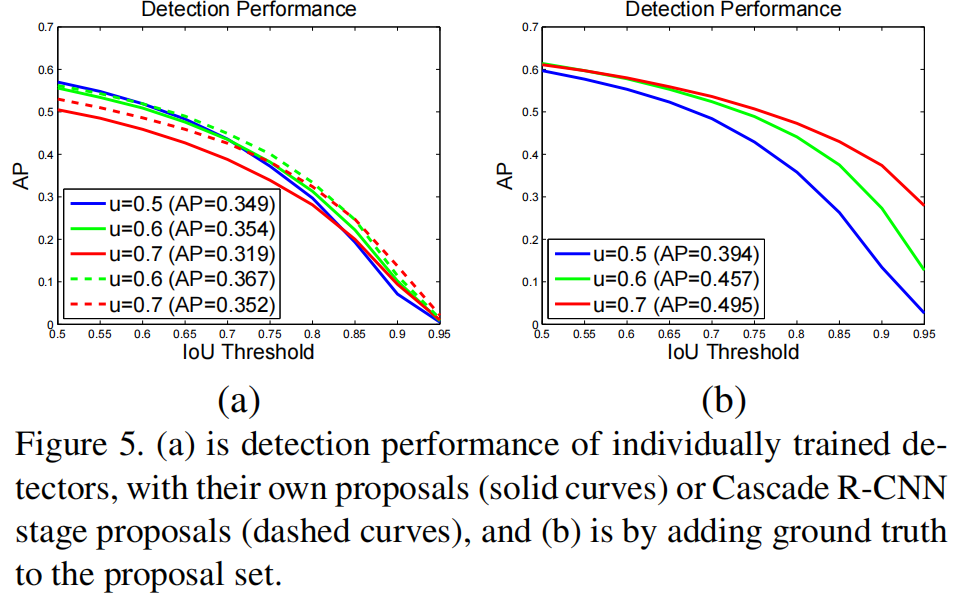
如 fig 5(a),三个独立训练的检测器在阈值 U = { 0.5,0.6,0.7 }下的AP,可以发现 u = 0.5 下训练的检测器,在低 IoU 条件下性能优于 u = 0.6 下训练的检测器,但高 IoU 条件下 u = 0.6 的性能更好,u = 0.5 的检测器性能最差;---- 但终究都是IoU阈值越高,检测器的AP性能越差;
fig 5(b):改变了预测阶段 proposals 的质量:将 ground true bbox 也加入至 RPN 输出的初始化 proposals 中,可以发现所有阈值 u 下训练的检测器性能都有提升,且 u = 0.7 下性能提升最明显,说明两个问题:
- u = 0.5下训练的检测器并不利于精准地检测目标,仅仅在低质量 hypotheses 下表现出色;
- 若想得到高精度的检测结果,就需要 hypotheses 质量更能匹配上检测分支的质量;
fig 5(a)中虚线:将初始化的 proposals 替换为 Cascade R-CNN 中 2nd(u = 0.6)、3rd(u = 0.7)输出的更高质量proposals,结果也说明了测试阶段当 proposals 的质量与检测器更匹配时,其性能会显著提升。
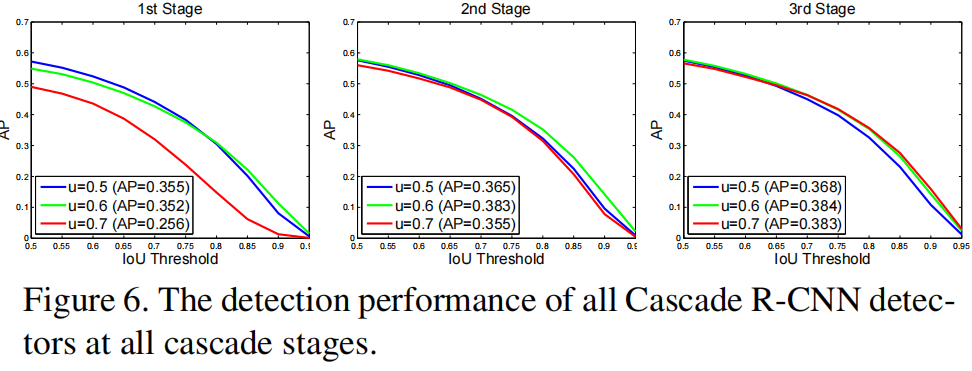
从 Cascade RCNN 的所有 stage 上做性能测试,得到的结果也大致类似,如 fig 6 中可知,当使用更高质量 hypotheses 时,各个检测器性能提升明显,特别是高 IoU 阈值下训练的检测分支,性能提升得更夸张;例如:u = 0.7的检测器在低质量 proposals 的 1st-stage 性能很差,但 2nd、3rd-stage 若输入了更高质量的 hypotheses,u = 0.7 的检测器性能提升也很明显;
此外,对比 fig 6 与 fig 5(a),尽管使用了相同的 proposals,fig 6 中基于 cascade 方式进阶训练的检测器,性能明显优于 fig 5(a) 中各个分支独立训练的检测器,这充分说明了,Cascade RCNN 这种通过进阶 boosting 改变训练数据分布的方式,训练的检测器性能更好;
Comparison with Iterative BBox and Integral Loss
我们比较了我们的方法和 Iterative BBox、Integral Loss 方法。Iterative Loss 方法是使用 FPN+ 持续迭代三次实现。Integral Loss 有相同数量的 heads,分别对应
Localization
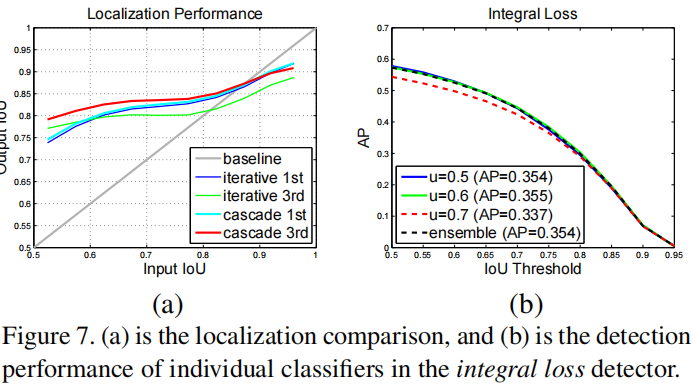
fig 7(a):Iterative BBox 与 Cascade RCNN 在定位性能上的比较;
Iterative BBox 中,1st-stage 在高 IoU 的 hypotheses 输入时,其输出性能竟然下降了(低于 baseline 的灰色线),且在 iterative BBox 的 3rd-stage 分支下,其性能进一步下降。但 Cascade RCNN 中 3rd-stage 性能优于 1st-stage,且在所有输入 IoU hypotheses 情形下,输出的 hypotheses 性能都优于 Iterative BBox;
Integral Loss
Integral Loss Detector:与 Cascade RCNN 相同数量的 cls heads,性能如 fig 7(b);u = 0.6 下检测器性能最好,u = 0.7 下性能却最差,且即使所有检测器 ensemble,性能也没显著提升;
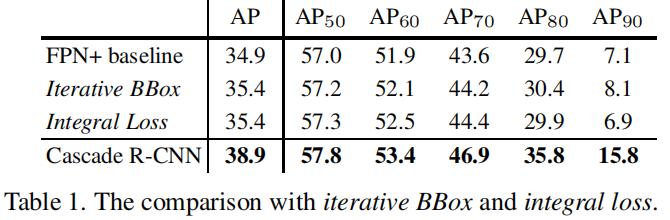
Table 1 中,iterative BBox / integral loss / Cascade RCNN 三者性能都优于 FPN+的baseline,且随着 AP 标准的提升,Cascade RCNN 的领先优势更明显;
Ablation Experiments
Stage-wise Comparison

table 2 为针对 stage 的消融实验,可以发现仅融合 1st-stage 性能就优于 baseline(受益于 multi-stage multi-task 的训练方式),2nd-stage、3rd-stage 也可以进一步提升性能,并且可以发现不同于 integral loss,更高的 IoU 检测分支,性能是提升的;最终三个检测分支 ensemble 后性能最好;
IoU Thresholds
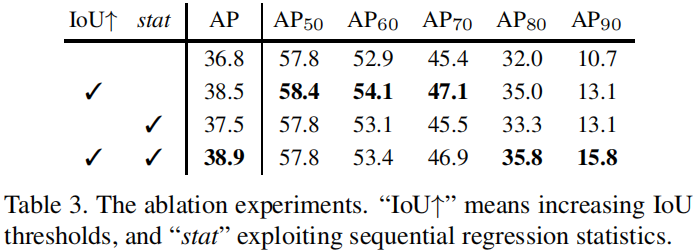
row 1:baseline 版 Cascade RCNN,所有检测分支的 head 使用同样 IoU 下收集的样本训练,各个 stage 的差异就仅体现在输入 hypotheses 的差异上(参照 fig 1(c)、fig 2,各个 stage 输入还是有区别的,但大致与 fig 2 中一致);但从 row 1 中可以看到,尽管各个分支在同 IoU 下收集的样本,但cascade结构还是提升了 baseline 性能,充分证明了 cascade 结构之优越性;
row 2:通过进阶提升 IoU 阈值 u 的方式,各个分支可以获得更多的 close FP 用于训练,进而可以提升更多的检测精度,结果与 4.2 小节分析保持一致;
Regression Statistics
如 fig 2,进阶地探索回归的统计结果有利于 cls + reg 的 multi-task 学习,从 table 3 中也可以看到该方案的优势,但作者提到:The learning is not sensitive to these statistics,为什么我觉得还是有区别的?
Number of Stages
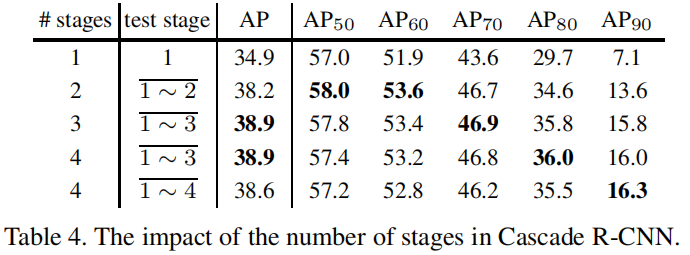
table 4 中针对 stage 的消融实验,对比 baseline,增加一个 stage 性能提升明显 (34.9% -> 38.2%),增加两个 stage 性能提升更明显,但增加三个 stage(u = 0.75)性能却还下降了,此外可以发现 4th-stage 的 AP 性能尽管降低了,但却在AP90下性能依然是最好的;
总结下来,3-stage 是性能 / 速度的最佳 trade-off;
Comparison with the Sota
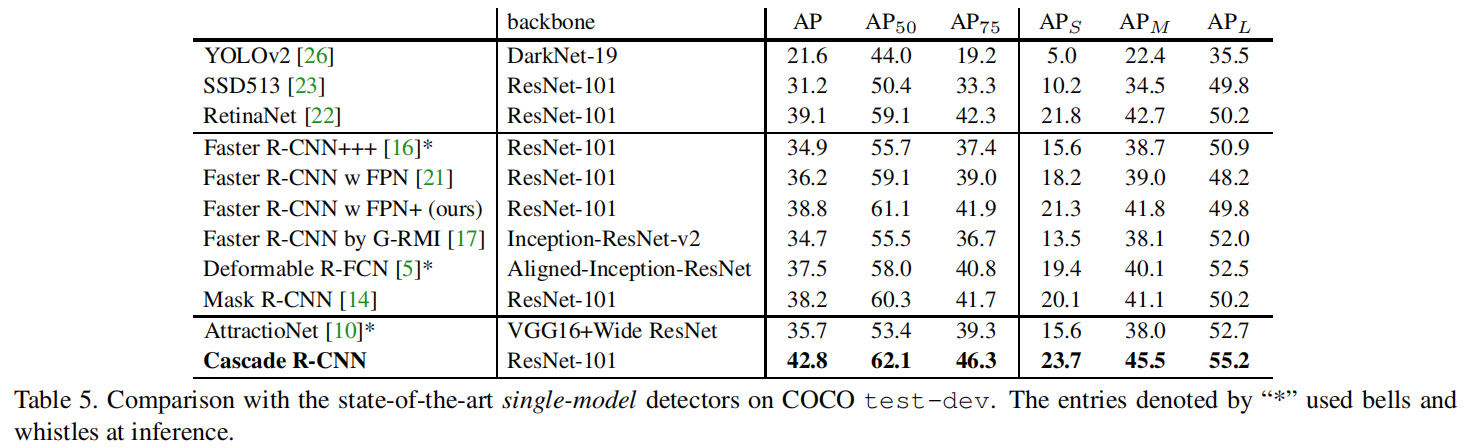
table 5,Cascade RCNN + FPN+ + ResNet-101 的 single-model 检测器,RoIs 数量:512;
table 5 中group 1:1-stage检测器;group 2:2-stage;group 3:3-stage;所有其他检测器在 u = 0.5阈值下训练,从frcnn + FPN+ 拓展成 Cascade RCNN,性能提升 4% (38.8% -> 42.8%),从table 5中可以发现,Cascade RCNN 在 single-model 下,各个指标都是 sota;
AttractioNet:multi-stage,通过 Iterative BBox 生成 proposals,但性能还是比 Cascade RCNN 差了 7.1%,且 Cascade RCNN 不像 Mask R-CNN 那样,还需要使用分割的监督信息;
Generalization Capacity
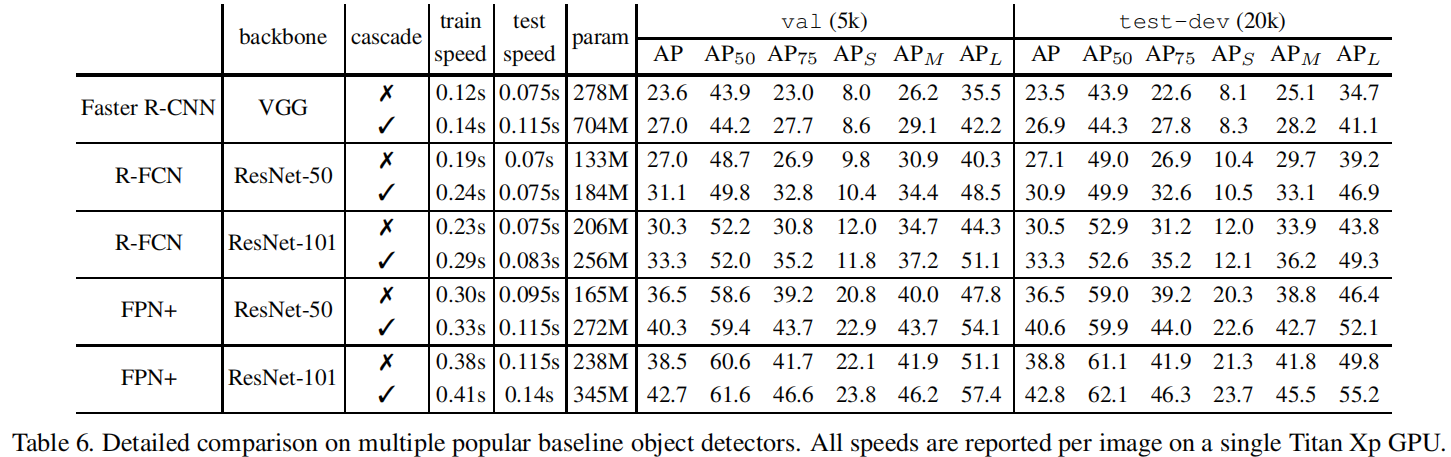
Faster RCNN、R-FCN、FPN+上都添加了3-stage的Cascade R-CNN结构,性能对比如table 6;
Detection Performance
从 table 6 中可以发现,添加 Cascade RCNN 结构后,三个 baseline 都能在 val / test-dev 上获得 2 ~ 4% 的性能提升,充分说明 Cascade RCNN 的普适性。
Parameter and Timing
随着 cascade 检测分支数量的增加,模型的参数也会增大,但对于 baseline head 来说,检测分支数量增加带来的模型参数增加却是线性的,此外各个检测分支的计算量一般远远小于 RPN 层,因此 train / test 阶段,Cascade RCNN 的计算量带来的额外开销都比较少;
Conclusion
- 我们提出了一个 two-stage 的目标检测框架,Cascade R-CNN,用于检测高质量的 proposal
- 这个架构避免了训练过程中过拟合和推理过程中 quality mismatch 的问题
- Cascade RCNN 在 COCO 上的高性能充分说明,通过理解和掌握影响目标检测的各种小因素,并作出一丢丢小改进,也会有很大的性能提升空间;
- 本文算法可以应用在更多目标检测算法上,可以作为一个很好的 baseline